



Pesticides Spraying Using Non-GPS-Based Autonomous Drone
|
Abstract |
1. Introduction |
|
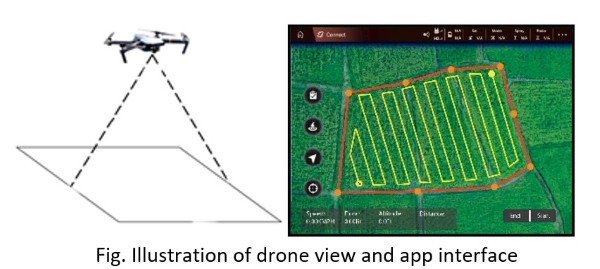
Technological use in agriculture has a greater impact on efficient farming that elevates crop yield. The use of drones in the agriculture field helps farmers to a greater extent. This paper demonstrates the development of a non-GPS-based autonomous pesticide spraying drone, which is particularly useful for farms with limited land sizes and in areas where GPS is inaccurate. Because of poor GPS positioning and mapping, GPS became unreliable. This autonomous drone creates an optimized navigation path around the mapped field spraying pesticides uniformly over the crops. This agriculture drone carries a fluid pesticide tank to spray evenly all over the crop, reducing the time and effort of the farmer and preventing harmful effects caused by pesticides. This drone can adjust the altitude, liquid flow rate and speed depending on the type of crop. This drone included with the monitoring application platform provides real-time information. The web application is user-friendly, ensuring that drone performance is manageable and understandable by the user. With the help of these features, the farmer is able to comprehend the field's spray in real time. |
Nowadays, autonomous drones and UAVs are used for military purposes viz. spying, surveillance, inspection, payload carrying, and other military-grade missions and in the agriculture sector which plays a crucial role in crop production as well as in the country’s economy. The application of fertilizers, pesticides and insecticides is of prime importance for crop yields. Manual spraying of pesticides requires a lot of time and effort. An autonomous drone maintains a certain speed, liquid flow rate and altitude so that it covers the maximum area and sprays evenly all over the field. Object avoiding, pesticide spraying and aerial drone do not require any human activity. A fully autonomous drone maps the field, sets an optimized path and studies the entire field. The autonomous drone will maintain a certain speed while it is flying. This Autonomous Drone can avoid obstacles by using depth sensor cameras and image processing. The drone captures crop images and examines plant health and also it can complete the task even in poor light and at night with intelligent mapping and autonomous flight. |
|
2. Background |
3. Project Work |
|
Autonomous drones are unmanned aerial electronic machines that utilize artificial intelligence and computer vision for self-flying and aerial actions through integrated circuitry and programming. They are the future of videography and surveillance. Even now, drones are utilizing such strong AI that they’re able to make obstacle avoidance decisions, understand and follow objects, and record amazing visuals with high-quality cameras and sensors. Autonomous drones have grown significantly over the years in various fields, including military, agriculture, transportation, delivery, inspection, and surveillance. They have become popular due to their ability to access hard-to-reach areas, perform dangerous tasks without risking human lives, and increase efficiency and productivity. |
We have integrated a Drone with Artificial intelligence, Image processing, path planning and path prediction for the accurate spraying of pesticides in the overall field using Raspberry Pi. Integrated with A* algorithm for accurate path planning and path prediction.
|
|
4. Result |
5. Conclusion |
|
|
For a country like India where the land size is small and there is no accurate GPS mapping available, the designed UAV can map the field accurately and follow the designated path for pesticide spraying. UAVs with artificial intelligence capabilities. The methodology proposed in this research is novel in comparison to existing unmanned aerial vehicles utilized in agriculture. Additional sensors can make the entire process of field monitoring considerably simpler and easier. There are numerous UAV designs and projects in agriculture, however, the methods mentioned in this article can support you in monitoring fields without the use of GPS. |
|
6. Acknowledgement |
7. References |
|
I would like to thank my teachers, Prashant Pal, Shashank Kumar, Surya Charan, and Saurabh Bhansod, for their guidance and support in completing my project and research paper on "Pesticides Spraying Using Non-GPS Based Autonomous Drone." Their expertise and encouragement were invaluable in shaping my understanding of the topic. I am also grateful to my colleagues and peers who provided feedback and suggestions, improving the project's quality. Lastly, I thank the institutions and organizations that provided resources and infrastructure for the research. Thank you all for contributing to the successful completion of this project and the publication of the research paper. |
|
|
8. Developed by |
|
|
|
|