



Swarm Robotics for Ultra-Violet Sterilization Robot
|
Abstract |
1. Introduction |
|
Swarm robotics is a technical approach of multiple robots working together and solving multiple problems at a time. Enormous and complex work cannot be done using conventional approaches, so this system will help to work in an organized way to deal with this complex work. This paper mainly focuses on using a Swarm Robotics System for UV sterilization robots. The most crucial elements in maintaining human health are proper cleanliness and hygiene standards. This system will reduce traditional cleaning costs and reduce humankind’s vulnerability to infection. The advancements in hardware technology, cooperative approaches in biology, and swarm intelligence in the future will be boosted in the development of swarm robotics systems |
Swarm robotics focuses on the planning, creation, and deployment of large teams of robots that work together to solve issues or complete tasks. It draws its inspiration from naturally occurring self-organizing systems like social insects, fish schools, and bird flocks that exhibit emergent group behaviour based on basic local interaction principles. To create multi-robot systems with comparable capabilities, swarm robotics typically draws engineering ideas from the study of those natural systems. By doing this, it hopes to create robot systems that are more resilient, fault-tolerant, and adaptable than individual robots and that are capable of better adjusting their behaviour to environmental change |
|
2. Background |
3. Project Work |
|
It is essential to provide some background information about the Swarm Robotics strategy. An ant colony or a flock of birds are two examples of social creatures whose natural and self-organized activities inspire the developing field of Swarm Robotics. The ideas of self-organization can be used to adapt these social animal behaviour models to groups of straightforward, autonomous robots. The robots must not use a complicated algorithm or a sophisticated and intricate system. The basic goal of Swarm Robot is to use emergent behaviour, which is how social insects function, to solve complicated issues by taking advantage of small interactions between the robots. |
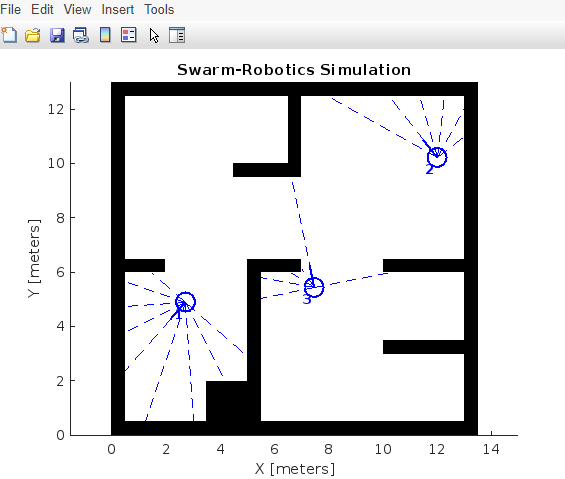
In this project, we choose Wi-Fi communication. Here, MATLAB will be the first used for simulation purposes. We simulate the disinfect robots using the mobile Robotics simulation toolbox. Additionally, Simulink for graphic design. In this, we created an environment for swam behaviour. In the peer-to-peer network, the user accesses a web page, which sends data to a server, which in turn sends the data to the end node swarm robot through Wi-Fi. We will use Wi-Fi as the primary means of communication between the robot server and the robot swarm. |
|
4. Result |
5. Conclusion |
|
The above fig. It’s our simulation results, we have used MATLAB software. In this MATLAB software, we used the Mobile robotics simulation toolbox. Mobile robotics simulation toolbox has a SwarmTeamMain.m MATLAB file and Simulink has a MultiRobotAvoidance.slx file for simulation purposes. |
Manufacturing is a key requirement for the development of swarm robotics systems, and cooperative algorithms are necessary for the swarm to provide control over it. The size of robots will be decreased because of advancements in swarm robotics technology in the areas of communication systems, sensors, actuators, and electronic components. We believe that the development of swarm robotics systems will be boosted by advancements in hardware technology, cooperative approaches in biology, and swarm intelligence in the future. The robot will be capable to handle the primary task which focuses on issues related to human health. Essentially, people are put at risk by the use of stronger disinfectants that robots can employ. |
|
|
|
|
6. Acknowledgement |
7. References |
|
The satisfaction and euphoria that accompany the successful completion of any task would be incomplete without the mentioning of the people whose constant guidance and encouragement made it possible. It gives me immense pleasure to present our project report on “Swarm Robotics for Ultra-Violet Sterilization Robot” as a part of final year study of B.TECH, which is result of studied blend of both research & knowledge. We are deeply indebted to Dr. Sanjeev Kumar Gupta, Executive Director, NIELIT, Aurangabad under whose guidance, motivation, encouragement and faith in us provided opportunity to work on this project. We would like also to thank my guide Mr. Ganesh Patil for their inspiration, guidance and support. This constant source of encouragement, support and motivation helped us in a long way throughout the project phase; this forced us to the limit and brought forward in us. Also we sincerely thank to S. Gera, Academic dean and Prashant Pal, B.TECH coordinator for providing resources in laboratory and we are very much thankful to all teaching and non-teaching staff who were directly and indirectly involved in our project work. We wish to thank our parents having raised us in such conducive and loving environment, for teaching us to work hard and persevere, which has enabled us to come so far. We wish to thank wholehearted support of our batch-mates of B.TECH and specially our seniors, who were always present whenever we needed them. |
|
|
8. Developed by |
|
|
|
|